The Automobile Platform Dilemma
By RK Anand, CSO & Co-founder
The rapid evolution of the smartphone over the last 20 years rendered dominant players, such as Motorola, Blackberry, and Nokia, obsolete — they could not recognize the industry shift to a platform model, the rapid pace of innovation, the emergence of the app ecosystem, and a resulting change in the revenue mix.
By 2000, Nokia accounted for a mindboggling “4% of Finnish GDP, 70% of Helsinki’s stock exchange market capital, 21% of total exports and 14% of its corporate tax revenues.” Its scale and impact were, and still are, unprecedented. Nokia’s 2006 mobile phone market share stood at 41%. However, due to the introduction of the iPhone, Nokia lost its market share and ceased to exist.
By 2011, apart from Apple, the mobile phone industry utilized a platform developed by one of a few companies — Qualcomm and Mediatek’s reference hardware and Google’s Android operating system. Samsung, a premier Android OEM, scaled this, and the smartphone market grew to over 1.5 Billion units in 2019.
The automotive industry is experiencing a similar shift. The sector’s size and scale make it a target for such disruption. In 2019, over 90 million vehicles were produced worldwide, grossing over US$ 3.5 Trillion.
Currently, the auto industry is experiencing electrification (EVs) and autonomization (AVs) — both are susceptible to standardization and modular design techniques used in the technology industry.
The EV platform will evolve through intense innovation and standardization into “skateboard” systems, such as Rivian, AEV Robotics, REE, and VW. Other manufacturers can put a “skin/top” over these platforms.
Regarding EVs, the parallels to the phone market are clear– different screen sizes, battery capacity, dual-SIMs, designer cases — all on a finite set of reference platforms.
In the AV realm, the parallels between vertically-integrated Apple in 2007 and Tesla in 2016 are apparent. Tesla is accelerating the pace of innovation and has a growing base of 1 million vehicles — they are ahead of the pack.
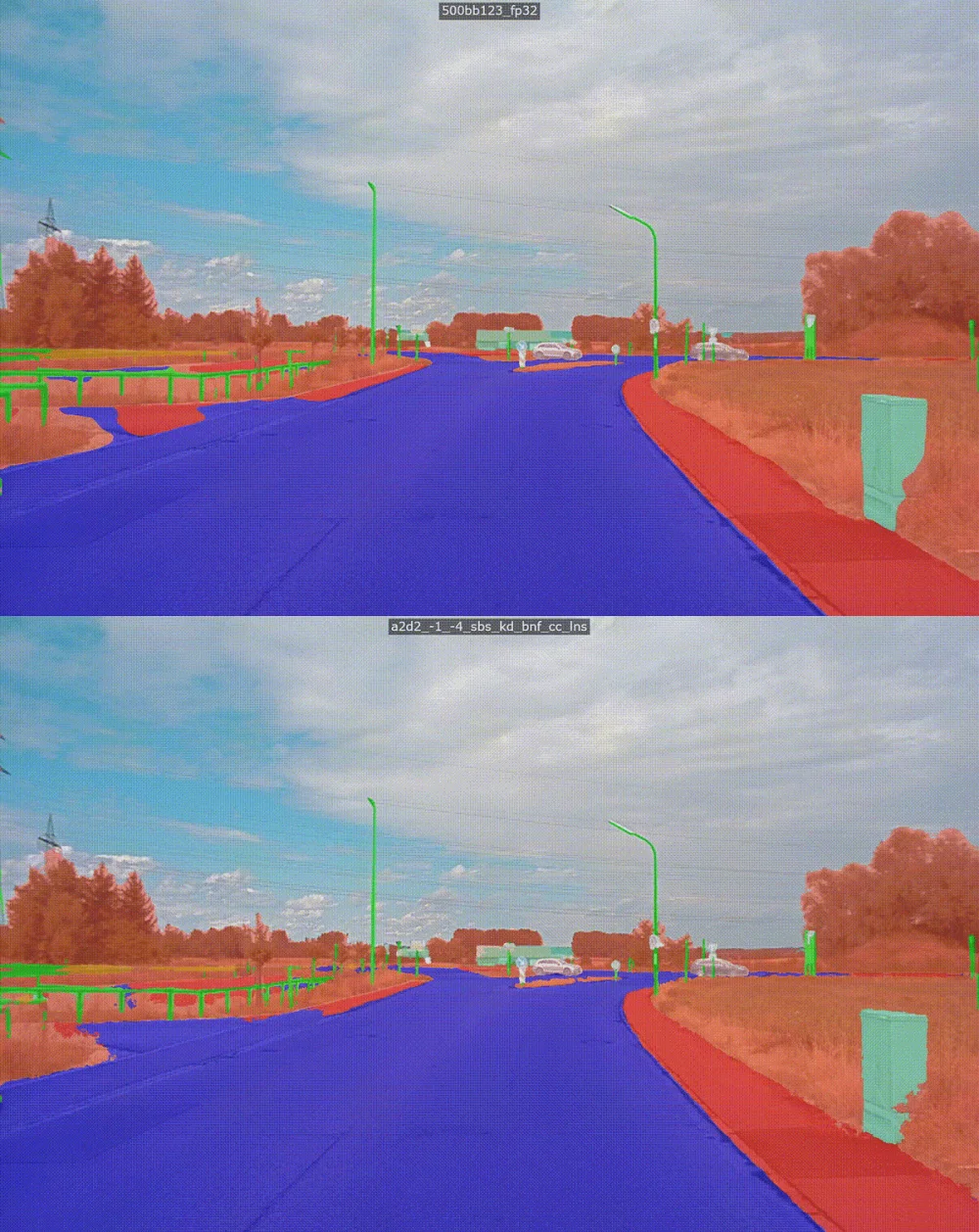
The fundamental competency for AV is expertise in Artificial Intelligence. AVs must quickly and accurately understand their surroundings. They need immense processing capability and power efficiency to deliver real-time interpretation of high-resolution data that sensors acquire. This is known as the visual scene-understanding problem.
We at Recogni are developing an AI-based visual perception platform, purpose-built to enable AVs to faultlessly perceive their surroundings in real time with unmatched efficiency.
Leapfrogging Tesla requires clear thinking, a clean-sheet approach to AV architecture, sourcing path-breaking hardware technology building-blocks, and continual innovation on software architectures for AI and AVs. As the market rhythm accelerates, time becomes the primary enemy and scaled learning the biggest hurdle.
AVs must have a sensing and computing platform with highly modular hardware and software.
Let us consider the hardware aspects.
A LAN should connect sensors and computing elements. The all-pervasive, time-tested, scalable, and ubiquitous LAN technology is Ethernet — a 10 Gigabit Ethernet is an appropriate network connection to future-proof designs.
Computing hardware should be purpose-built for AV tasks. From a design philosophy perspective, redundancy and reliability is vital.
AV systems should consolidate compute elements (ECUs) to a finite and manageable set, with the mindset that these are replaceable and upgradeable without “forklift” vehicle redesigns.
Balanced and secure systems must work effectively over this LAN. The right kind of compute adjacent to sensing elements for preprocessing sensory input is needed. Also, clarity on general-purpose compute versus purpose-built compute is essential.
The AV computing effort can be split as follows -
1) Sensory Perception
2) Sensor Fusion
3) Path Planning
4) Vehicle Controls
If sensory perception is not perfect, downstream functions like sensor fusion and path planning will be compromised.
The auto industry is at a crossroads — While there have been key advances in AV over the last several years, there has recently been a pull-back on full autonomy because of the realization of the complexity of this challenge, limitations of compute and sensor technologies, and the legacy architectural currently utilized.
Purpose-built compute is paramount given that sensors — cameras, radars, lidars, ultrasonic –are all unique. For the additional AV functions, there could be a mix of special-purpose and general-purpose compute devices, all communicating via the vehicle’s ethernet LAN infrastructure.
A low-power, small footprint perception system that accurately analyzes high frame rate from high-resolution cameras in real time, and seamlessly communicates intelligence to ECUs is necessary for AVs.
Taking software approaches from history — Google built the Android Operating System around open-sourced components, like a Linux kernel, and an application framework with Java-compatible libraries.
Tesla has also built much of its software architecture with Linux. Thus, OEMs should maximize open-source and build core AV components based on these building blocks.
Covid-19 has burdened auto companies with extraordinary costs. They face shuttered factories, uncertainty on future consumer behavior, and the potential shift in car-sharing. Considering the emerging AV use cases during this pandemic, this is an opportune moment to revisit the competitive landscape for both EV and AV, review vehicle architectures, and prepare for a whole new world. OEMs’ incumbent status quo will not close expanding gaps with new, innovative competitors.
Recogni is building technology to enable a quantum leap in Visual Perception performance — an essential element to realize functional and reliable Autonomous Vehicles.